[Research] Iterative-Closest-Point (ICP) Application in Lidar (2024, ongoing)
24Dec
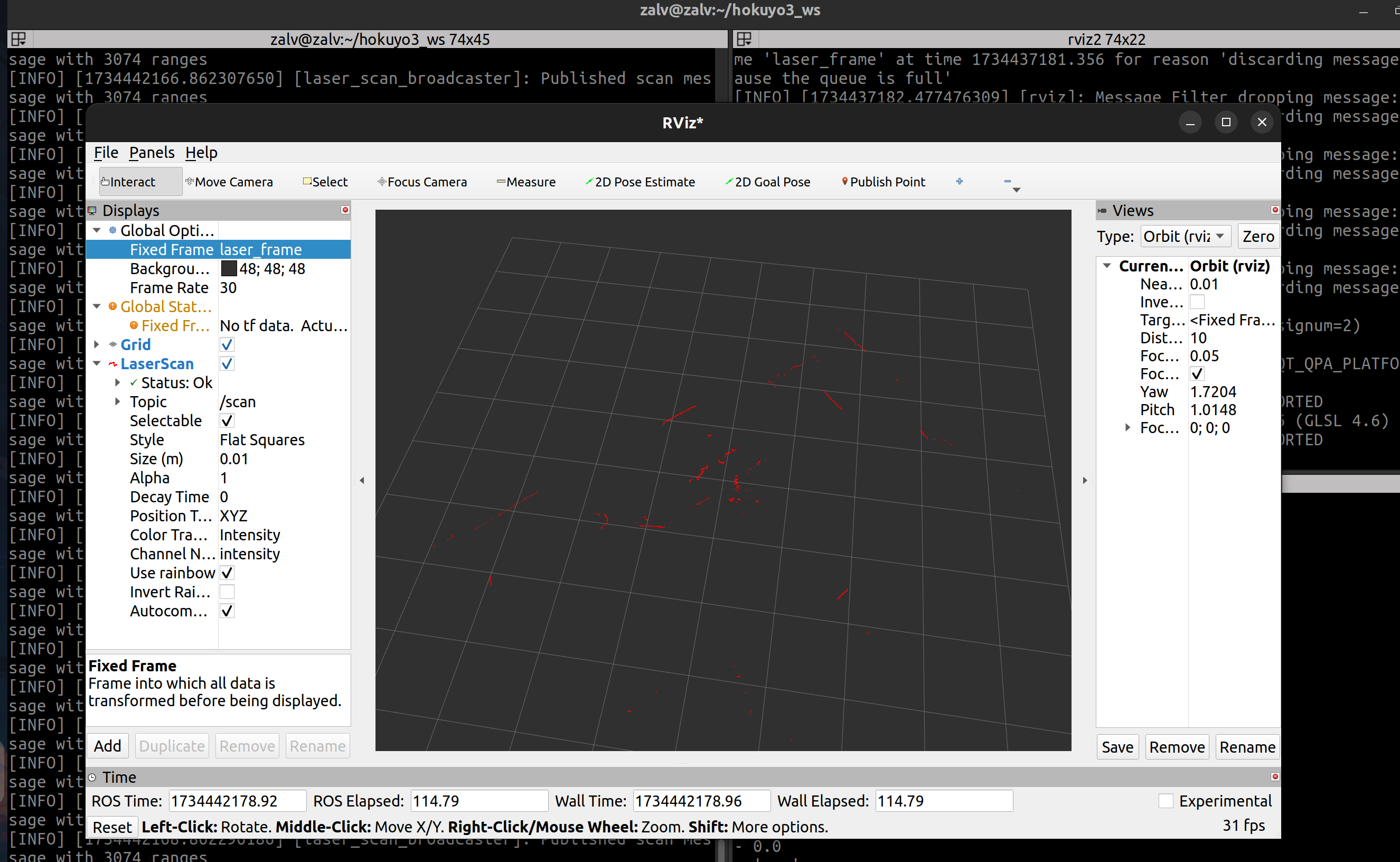
Right now, I’m working on research to use Iterative Closest Point (ICP) for helping robots figure out where they are in an environment. ICP is an algorithm that aligns 3D point clouds, which helps robots with localization and mapping. My focus is on improving how ICP works in real-time, using sensors like Lidar to create accurate maps and help the robot navigate better. The goal is to make the robot more precise in knowing its location, which is key for tasks like autonomous navigation.
My progress on this research can be seen in:
https://github.com/zalvexe/robotics-101/tree/main/Iterative-Closest-Point
Latest progress: publishing fixed_map topic